今回から、Nvidiaのプラットフォームの「Omniverse」の中にあるロボットシミュレーションツールキットである「IsaacSim(アイザックシム)の解説をしていきます。
まず、以下がホームページです。ここから翻訳やチュートリアルについて説明します。
What Is Isaac Sim? — Omniverse Robotics documentation
1.インストール
*Omniverseを起動して、EXCHANGEからISAで検索します。
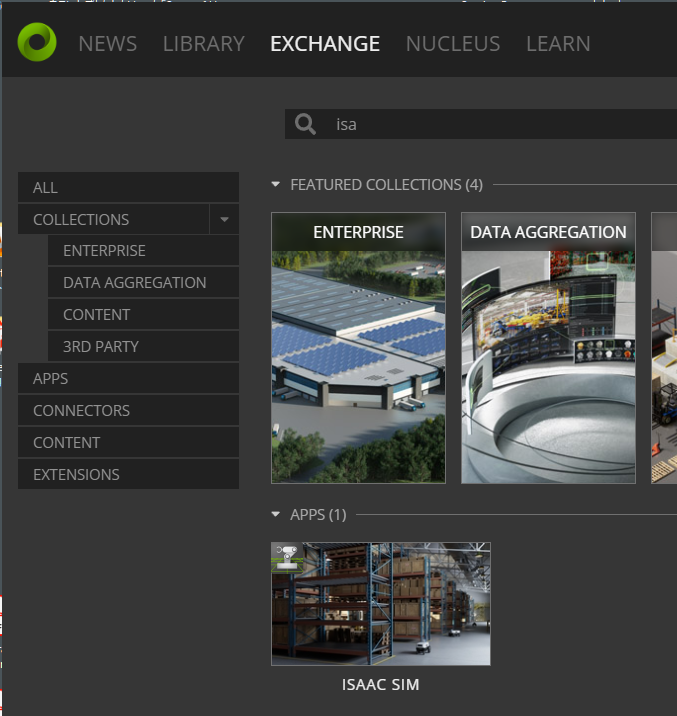
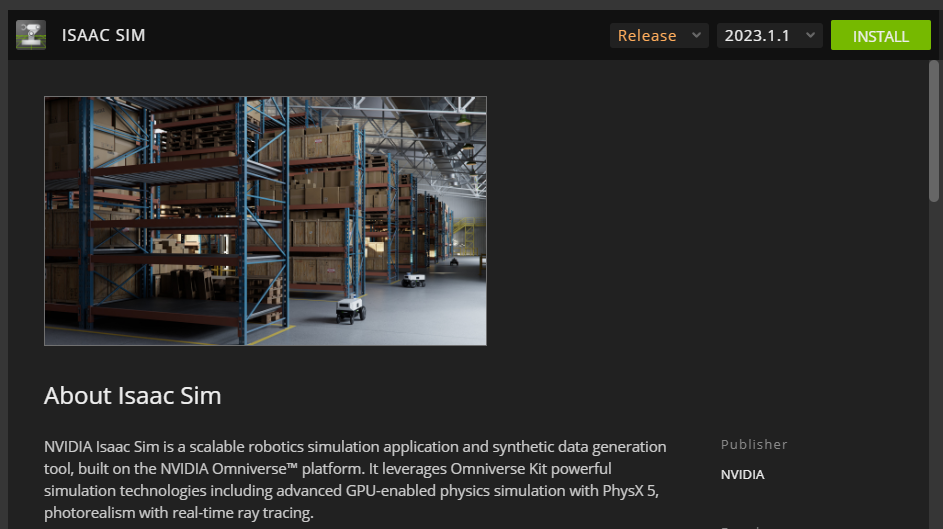
*INSTALLをクリックします。
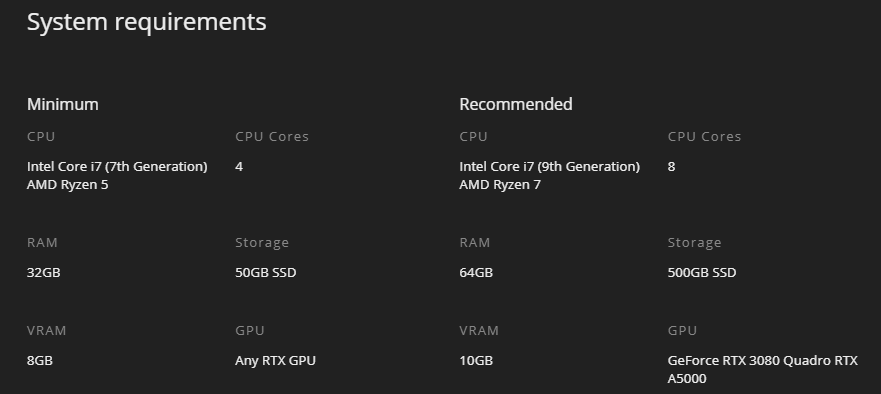
*スクロールすると、必要スペックが表示されます。かなり高いです。
*インストール中です。

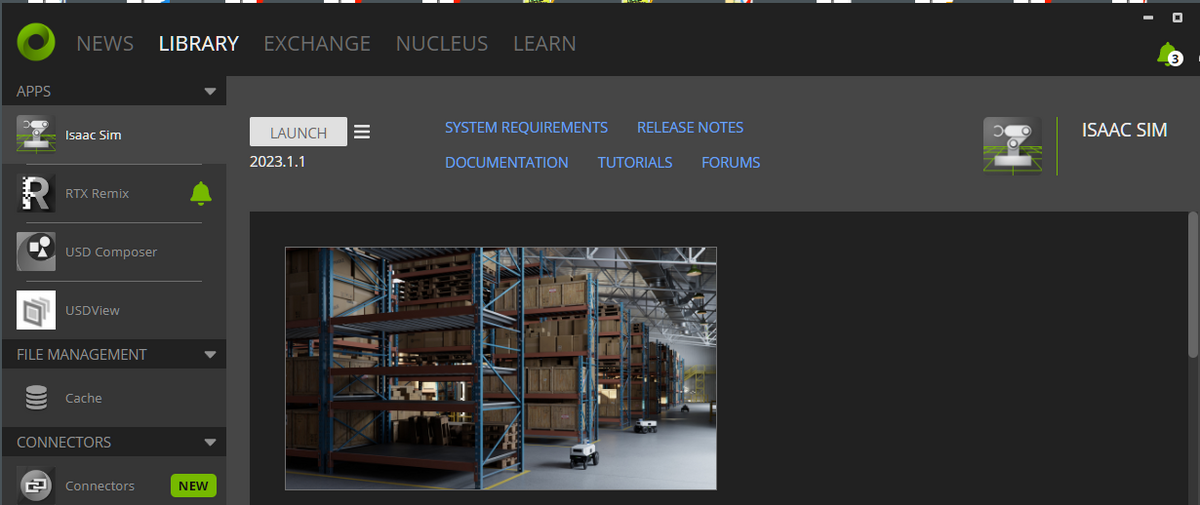
*インストール終了したらLIBRARYタブから「LAUNCH」をクリックして起動します。
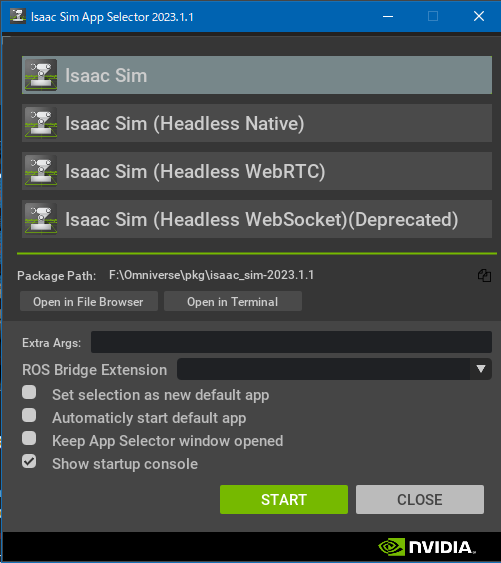
*HeadlessとWebRTCの選択が可能ですが、IsaacSimを選択して「START」します。
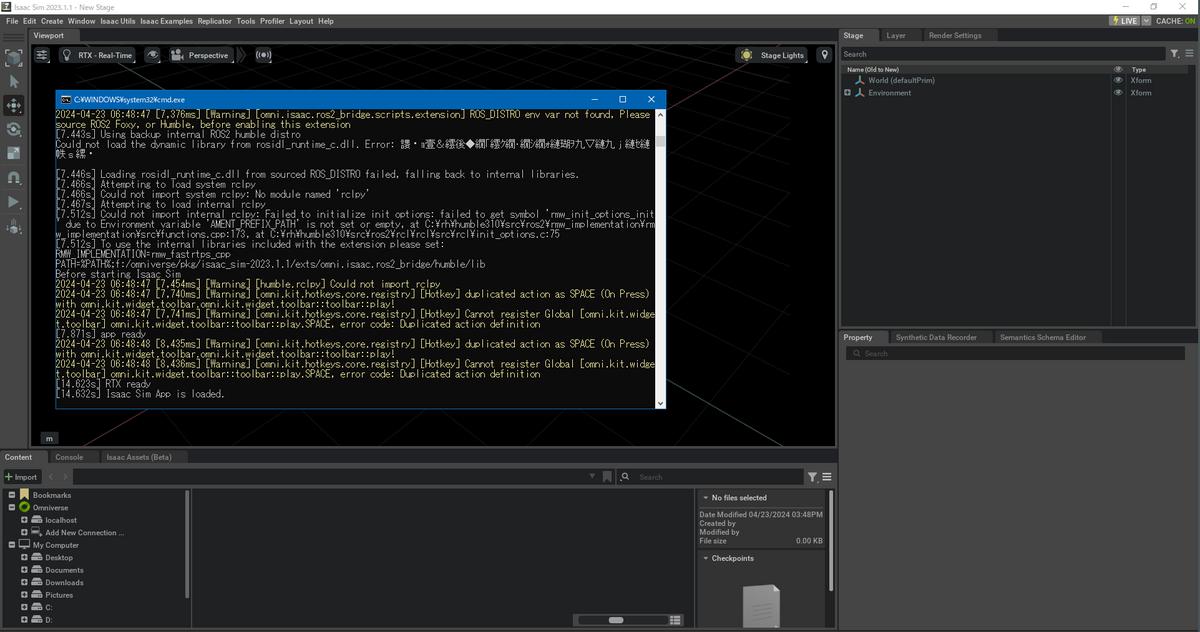
*これで起動できました。
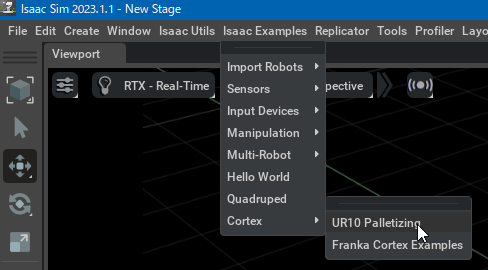
*デモシーンを実行します。
*LOADでシーンを読み込みます。
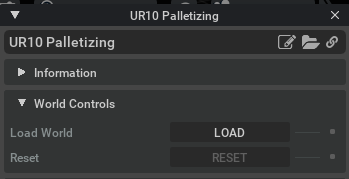
*Spaceキーで物理シミュレーションを実行します。「START Palletizing」でロボットアームが箱の方向を見て、動作を変化させます。
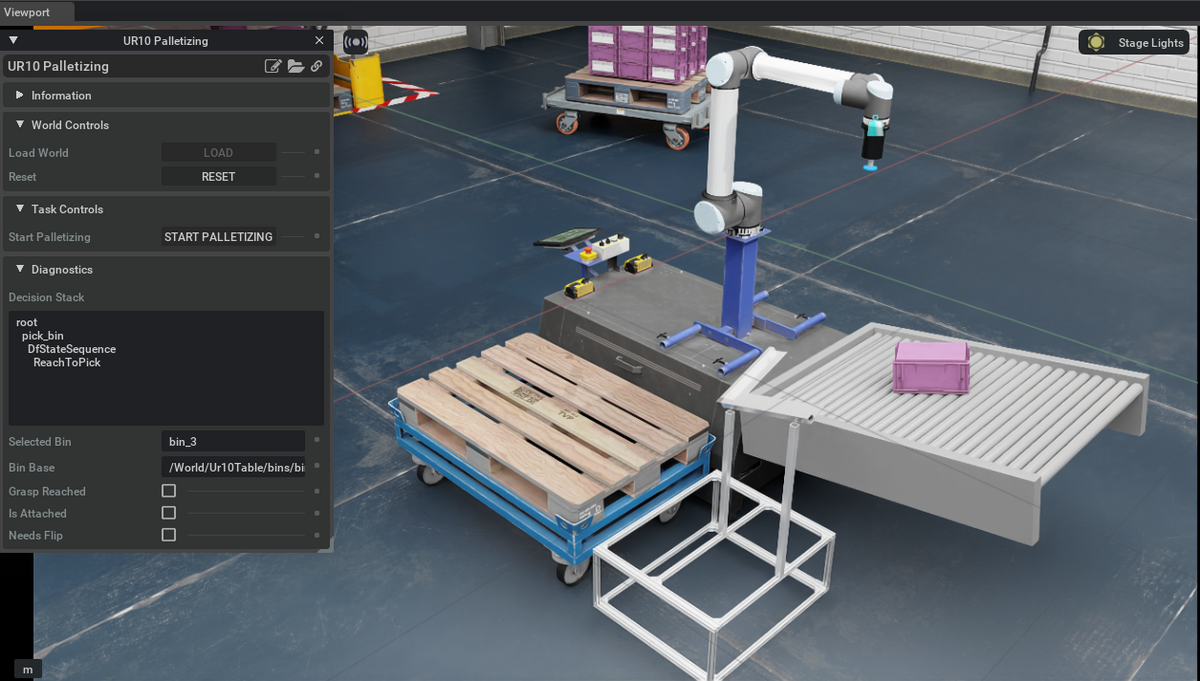
GIFアニメ
画面操作は、Mayaに近い仕組みを用いてます。
ALT+左マウスボタンドラッグ=視点の回転
ALT+中 〃 =視点の移動
ALT+右 〃 =視点のズーム または中ボタンホイール
Fキー =左ボタンクリックで選択したものを画面の中心へ移動する視点変更